

Design and DEM Analysis of Bionic Drag-reducing Slant Column Subsoilers
-
摘要:
过大的深松阻力是限制深松作业效果及深松机推广的重要原因之一,而深松阻力主要由深松铲引起,因而改进其结构、减小其作业阻力将有助于节能降耗及深松作业的推广。以善于挖掘的竹鼠及蚁狮幼虫为仿生对象,应用三维扫描仪对竹鼠爪趾及蚁狮幼虫进行结构获取,建立竹鼠爪趾及蚁狮幼虫背部的三维曲面。应用逆向工程原理提取优异的挖掘曲线,据此建立偏柱式深松铲三维模型。以深松深度、深松铲宽度及深松铲入土角为设计目标,设计出3种仿生偏柱式深松铲,并提出一种偏柱式深松铲铲柄的设计方法。应用EDEM软件对深松阻力进行模拟可知,深松铲铲柄及铲尖的仿生设计可有效减小其深松阻力,最大可减阻12.92%。仿生偏柱式深松铲设计将为深松铲结构优化提供新的设计思路。
Abstract:Excessive subsoiling resistance is one of important reasons that restrict effect of subsoiling operation and popularization of subsoiling machines.The subsoiling resistance is mainly caused by subsoiler, thus it will contribute to promotion of subsoiling, energy conservation and consumption reduction with improving subsoiler structures meanwhile reducing working resistance.Digging bamboo rat (
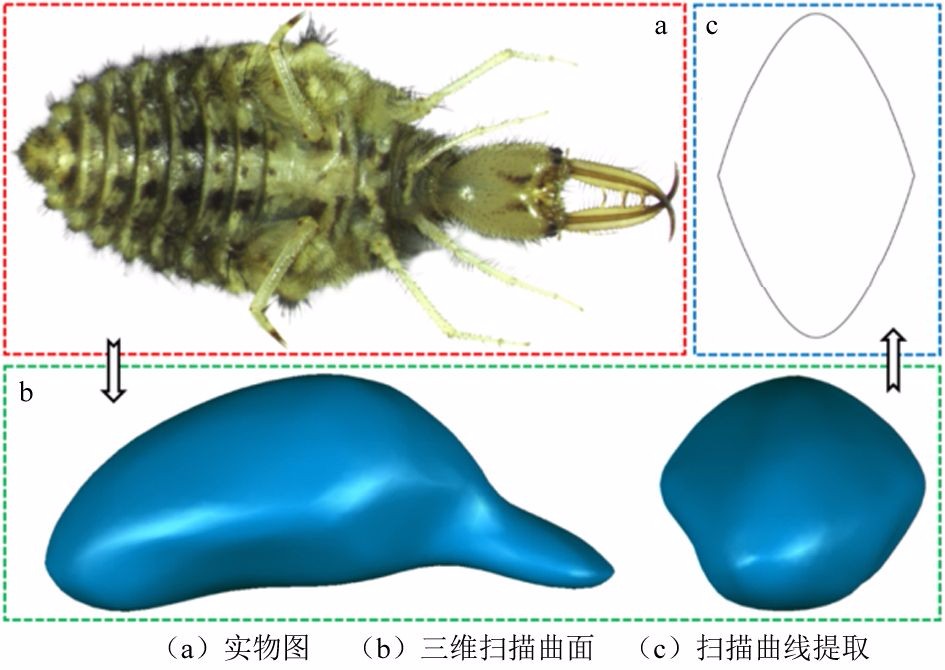
Rhizomyidae ) and antlion (Myrmeleon sagax ) larvae were used as bionic objects.Structure of bamboo rat paw and antlion larvae was obtained by three-dimensional scanner Konica Minolta Vivid 910, hereby three-dimensional surface of bamboo rat paw and antlion larvae back was established.Excellent excavation curves were extracted by reverse engineering, solid models of slant column subsoilers were established.For targets of subsoiling depth, width and penetrating angle, a series of bionic slant column subsoilers was designed.In the meanwhile, a kind of design method was put forword for shovel shaft of slant column subsoilers.Simulation of subsoiling resistance by EDEM software showed that bionic design of subsoilers’ shovel shaft and shovel pointed could effectively reduce subsoiling resistance, and the maximum reduction rate was 12.92%.Design of bionic slant column subsoiler would provide a new design idea for its structural optimization.-
Keywords:
- subsoiler /
- bamboo rat /
- antlion /
- bionics /
- drag reduction
-

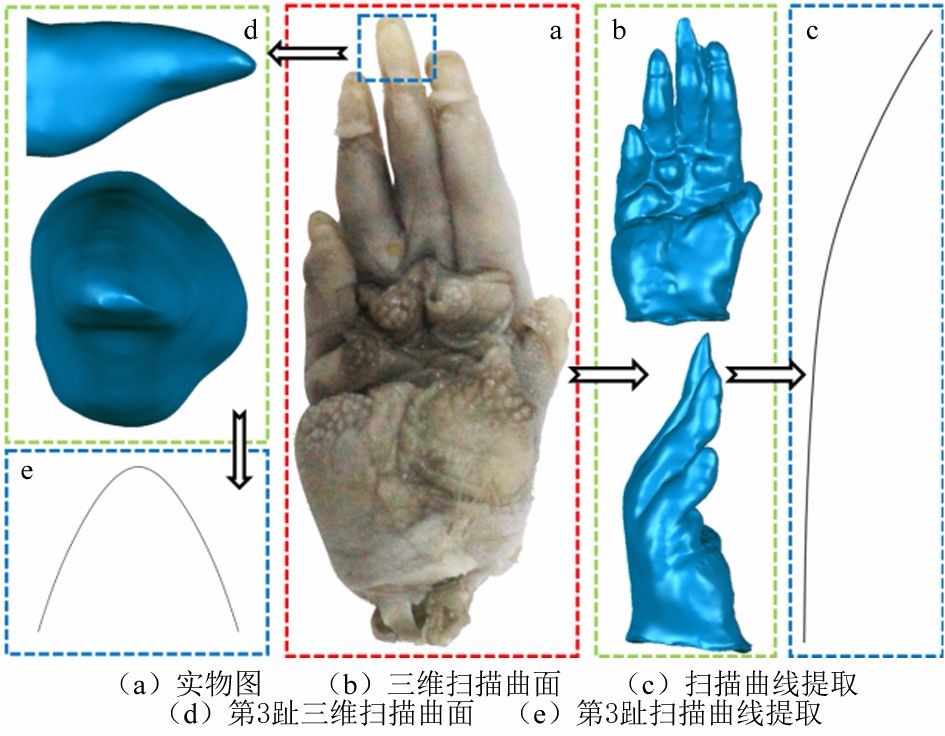
图 1 竹鼠右前爪三维扫描处理后的三维结构及曲线提取
Figure 1. 3D structure and curve extraction after 3D scanning ofright front paw of Rhizomyidae

图 2 蚁狮照片、三维扫描建模对比及背部曲线提取
Figure 2. Photos of antlion,comparison of 3D scanning modeling and back curve extraction

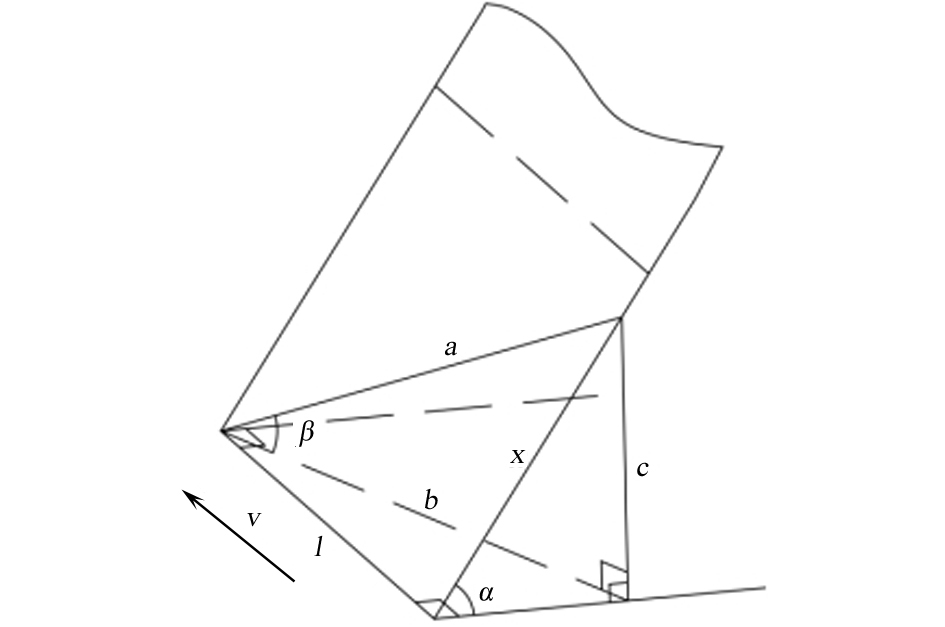
图 3 偏柱式深松铲铲柄与铲尖过渡区设计原理
Figure 3. Schematic diagram of transition zone between shovel shaft and shovel tip of slant column subsoilers

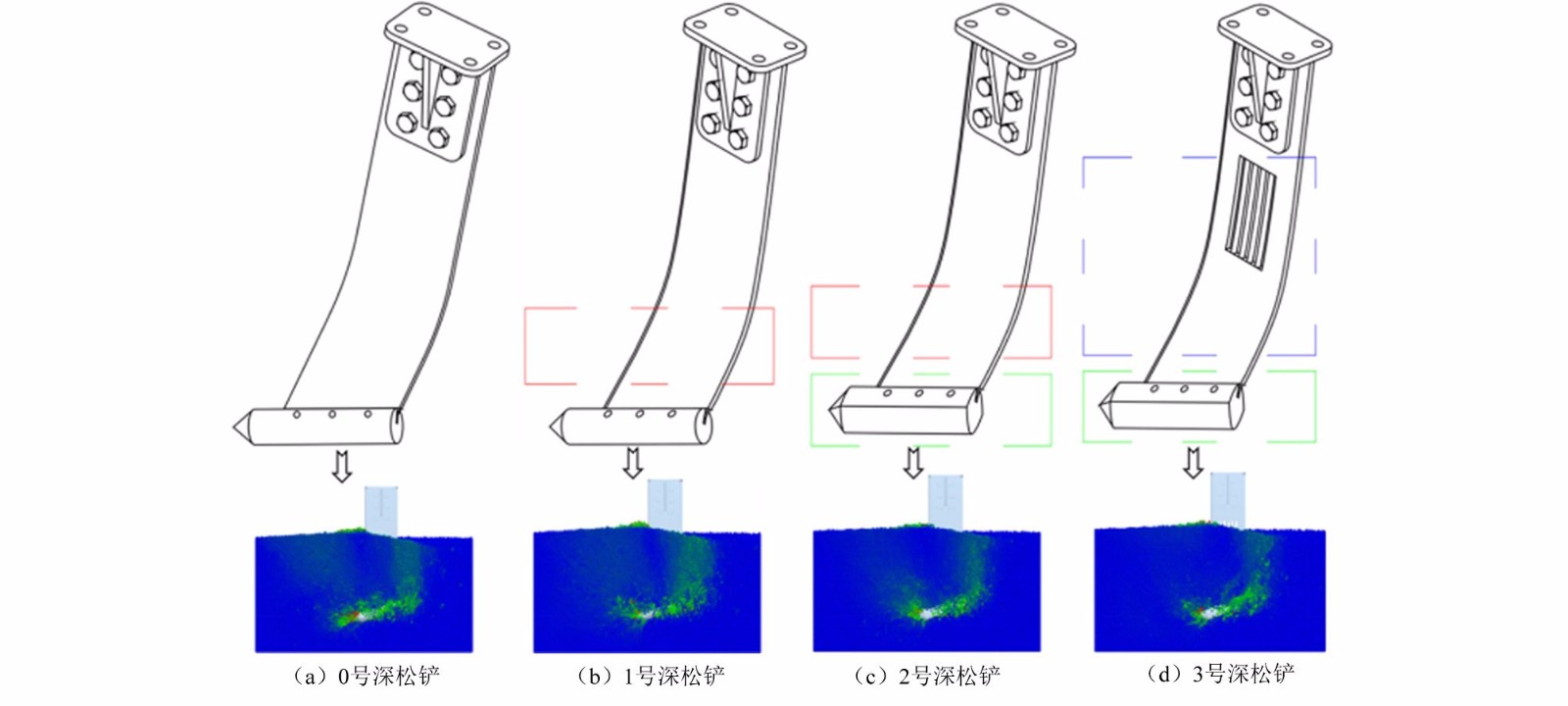
图 4 4种偏柱式深松铲设计及EDEM仿真颗粒运动速度截面
Figure 4. Design of four slant column subsoilers and cross-section of EDEM simulation particle movement velocity

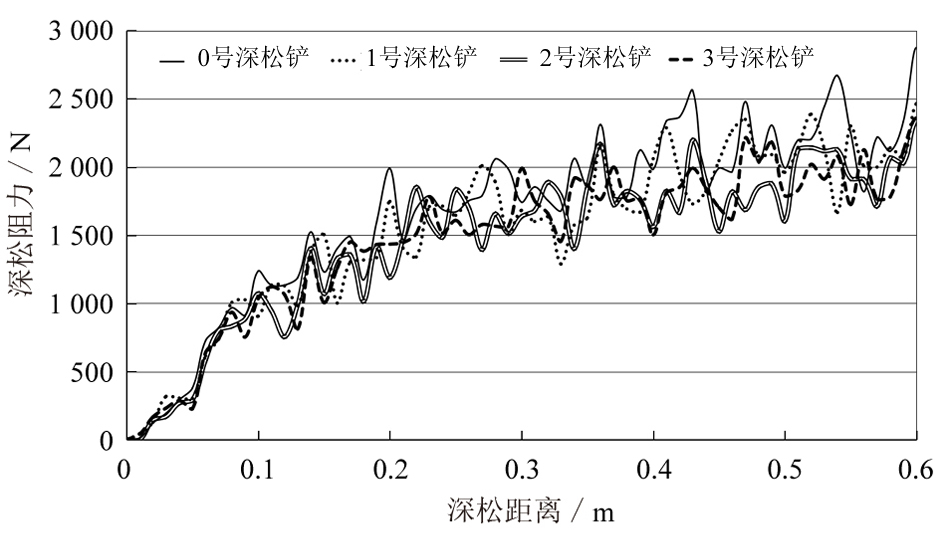
图 5 4种不同深松铲仿真阻力随运动距离的变化关系
Figure 5. Relationship between simulation resistance of four kinds of subsoilers and movement distance
表 1 EDEM仿真参数设定
Table 1. EDEM simulation parameter setting
参数 数值 颗粒半径/mm 5 土壤颗粒容重/(kg∙m−3) 2 550 土壤颗粒泊松比 0.32 土壤剪切模量/Pa 1.04×108 土壤与土壤间碰撞系数 0.48 土壤与土壤间静摩擦系数 0.52 土壤与土壤间滚动摩擦系数 0.40 深松铲密度/(kg∙m−3) 7 800 深松铲泊松比 0.30 深松铲剪切模量/Pa 7.9×1010 深松铲与土壤间碰撞系数 0.30 深松铲与土壤间静摩擦系数 0.56 深松铲与土壤间滚动摩擦系数 0.30  下载: 导出CSV
下载: 导出CSV
-
[1] 何明,高焕文,董培岩,等.一年两熟地区保护性耕作深松试验[J].农业机械学报,2018,49(7):58-63. doi: 10.6041/j.issn.1000-1298.2018.07.007HE Ming,GAO Huanwen,DONG Peiyan,et al.Sub-soiling experiment on double cropping and conservation tillage adopted area[J].Transactions of the Chinese Society for Agricultural Machinery,2018,49(7):58-63. doi: 10.6041/j.issn.1000-1298.2018.07.007 [2] 刘俊安.基于离散元方法的深松铲参数优化及松土综合效应研究[D].北京: 中国农业大学, 2018.LIU Junan.Study on subsoiler parameters optimization and comprehensive effect of subsoiling based on the discrete element method[D].Beijing: China Agricultural University, 2018. [3] 刘俊安,王晓燕,李洪文,等.基于土壤扰动与牵引阻力的深松铲结构参数优化[J].农业机械学报,2017,48(2):60-67. doi: 10.6041/j.issn.1000-1298.2017.02.008LIU Junan,WANG Xiaoyan,LI Hongwen,et al.Optimization of structural parameters of subsoiler based on soil disturbance and traction resistance[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(2):60-67. doi: 10.6041/j.issn.1000-1298.2017.02.008 [4] 周华,张文良,杨全军,等.滑切型自激振动减阻深松装置设计与试验[J].农业机械学报,2019,50(5):78-85.ZHOU Hua,ZHANG Wenliang,YANG Quanjun,et al.Design and experiment of sliding cutting self-excited vibration drag reduction subsoiling device[J].Transactions of the Chinese Society for Agricultural Machinery,2019,50(5):78-85. [5] 张金波,佟金,马云海.仿生减阻深松铲设计与试验[J].农业机械学报,2014,45(4):141-145. doi: 10.6041/j.issn.1000-1298.2014.04.022ZHANG Jinbo,TONG Jin,MA Yunhai.Design and experiment of bionic anti-drag subsoiler[J].Transactions of the Chinese Society for Agricultural Machinery,2014,45(4):141-145. doi: 10.6041/j.issn.1000-1298.2014.04.022 [6] 邬立岩,齐胜,宋玉秋,等.水田作业机械仿生表面减阻机理的离散元研究[J].沈阳农业大学学报,2017,48(1):55-62.WU Liyan,QI Sheng,SONG Yuqiu,et al.A DEM analysis on drag reduction characteristics of paddy field machinery surface with bionic microarchitectures[J].Journal of Shenyang Agricultural University,2017,48(1):55-62. [7] 孙久荣,程红,丛茜,等.蜣螂(Copris ochus Motschulsky)减粘脱附的仿生学研究[J].生物物理学报,2001,17(4):785-793. doi: 10.3321/j.issn:1000-6737.2001.04.027SUN Jiurong,CHENG Hong,CONG Qian,et al.Bionic study on the dung beetle Copris ochus Motschulsky for reduction of soil adhesion[J].Acta Bio Physica Sinica,2001,17(4):785-793. doi: 10.3321/j.issn:1000-6737.2001.04.027 [8] 张金波.深松铲减阻耐磨仿生理论与技术[D].长春: 吉林大学, 2014.ZHANG Jinbo.Bionic drag reduction and wear-resistant theory and techniques of subsoiler[D].Changchun: Jilin University, 2014. [9] 汲文峰.旋耕-碎茬仿生刀片[D].长春: 吉林大学, 2010.JI Wenfeng.Biomimetic blades for soil-rototilling and stubble-breaking[D].Changchun: Jilin University, 2010. [10] 唐中海,游章强,刘昊,等.野生中华竹鼠的生物学特性及人工驯化与繁殖技术[J].江苏农业科学,2009(6):304-305. doi: 10.3969/j.issn.1002-1302.2009.06.128 [11] ALCALAY Y,BARKAE E D,OVADIA O,et al.Consequences of the instar stage for behavior in a pit-building antlion[J].Behavioural Processes,2014,103:105-111. doi: 10.1016/j.beproc.2013.11.009 [12] 王晓梅.基于多球充填的玉米籽粒群体建模方法研究[D].长春: 吉林大学, 2017.WANG Xiaomei.A multi-sphere based modelling method for maize grain assemblies[D].Changchun: Jilin University, 2017. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 32
- HTML全文浏览量: 12
- PDF下载量: 8
- 被引次数: 0
 京公网安备 11010502037498号
京公网安备 11010502037498号
