

Design and Research of Automatic Fruit and Vegetable Picking Execution Device
-
摘要:
针对传统刚性机械手在果蔬采摘过程中出现的驱动电机数过多、气源不便于携带等应用性问题,设计了由驱动模组、固定与切换模组和抓取模组3部分组成的果蔬自动化采摘执行装置。通过驱动模组的旋转电机配合切换结构,实现抓取模组绕着转轴整体旋转和抓取模组自体式旋转两种模式之间的切换,完成执行装置的位姿调整。同时,通过伸缩电机控制抓取爪的联动开合,取代传统的气动夹爪,实现对作业对象抓取。
Abstract:Aiming at application problems of traditional rigid manipulator in fruit and vegetable picking process, such as too many driving motors and inconvenient air source to carry, an automatic fruit and vegetable picking executive device was designed, which was composed of three parts: driving module, fixed and switching module and grabbing module.Through combination of rotating motor of driving module and switching structure, switching between two modes of overall rotation of grasping module around rotating shaft and self-body rotation of grasping module was realized, and posture adjustment of execution device was completed.At the same time, linkage opening and closing of grasping claw was controlled by telescopic motor, which replaced traditional pneumatic clamping claw and realizes object grasping.
-
Keywords:
- fruit and vegetable /
- picking device /
- execution device /
- motor drive
-
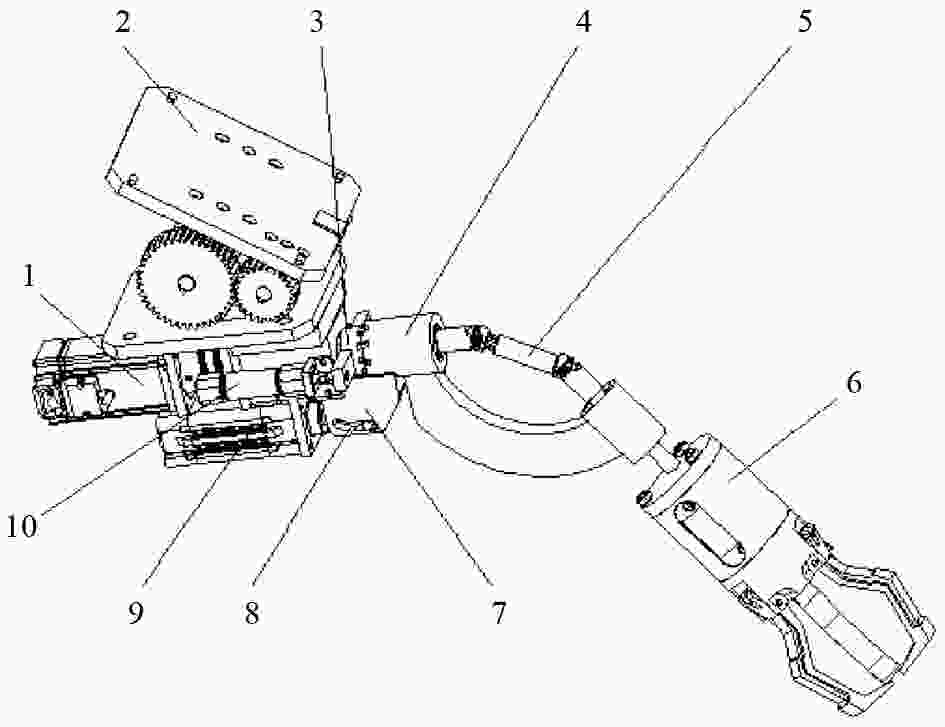
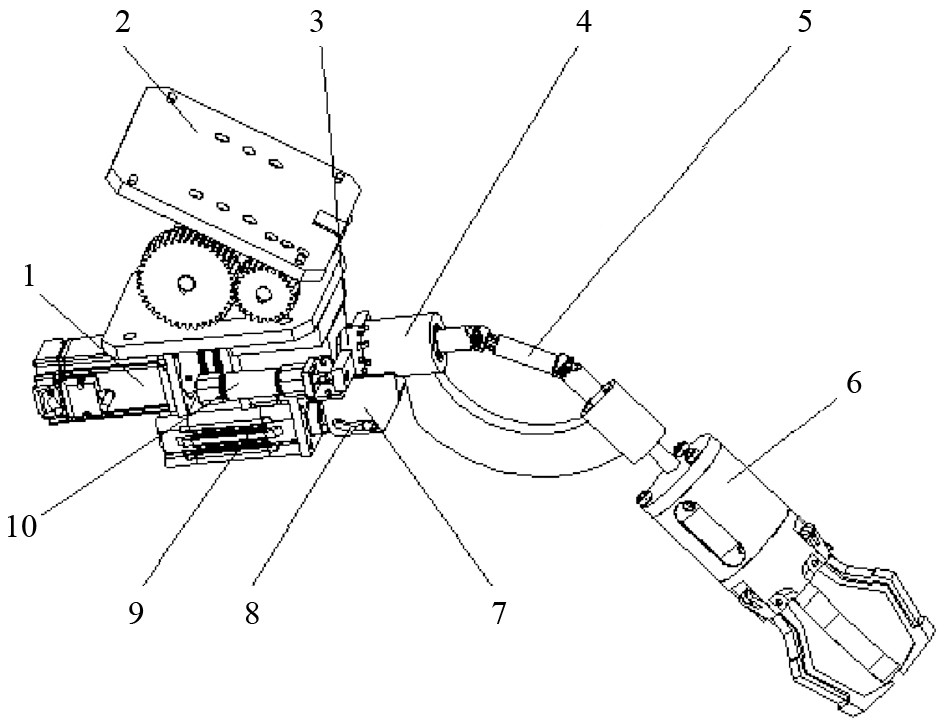
图 1 水果采摘装置
1. 旋转电机 2. 固定组件 3. 锁紧块 4. 支撑座 5. 连杆组件6. 抓取组件 7. 具有弧形槽的托板 8. 弧形槽 9. 顶出气缸
Figure 1. Fruit picking device
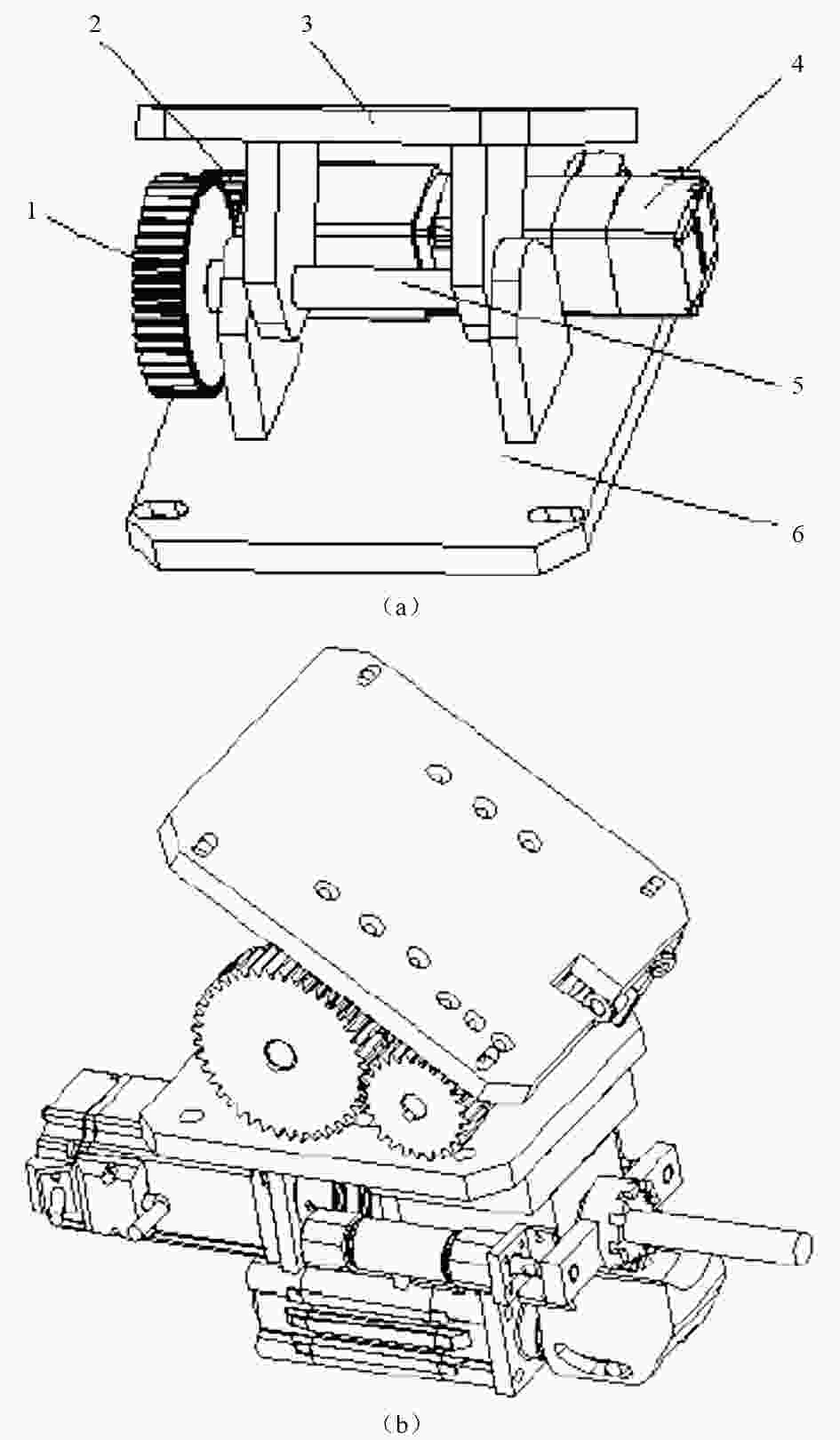
图 2 固定组件结构
1. 第1齿轮 2. 第2齿轮 3. 上连接板 4. 齿轮电机5. 连接轴 6. 下连接板
Figure 2. Structure of fixed components

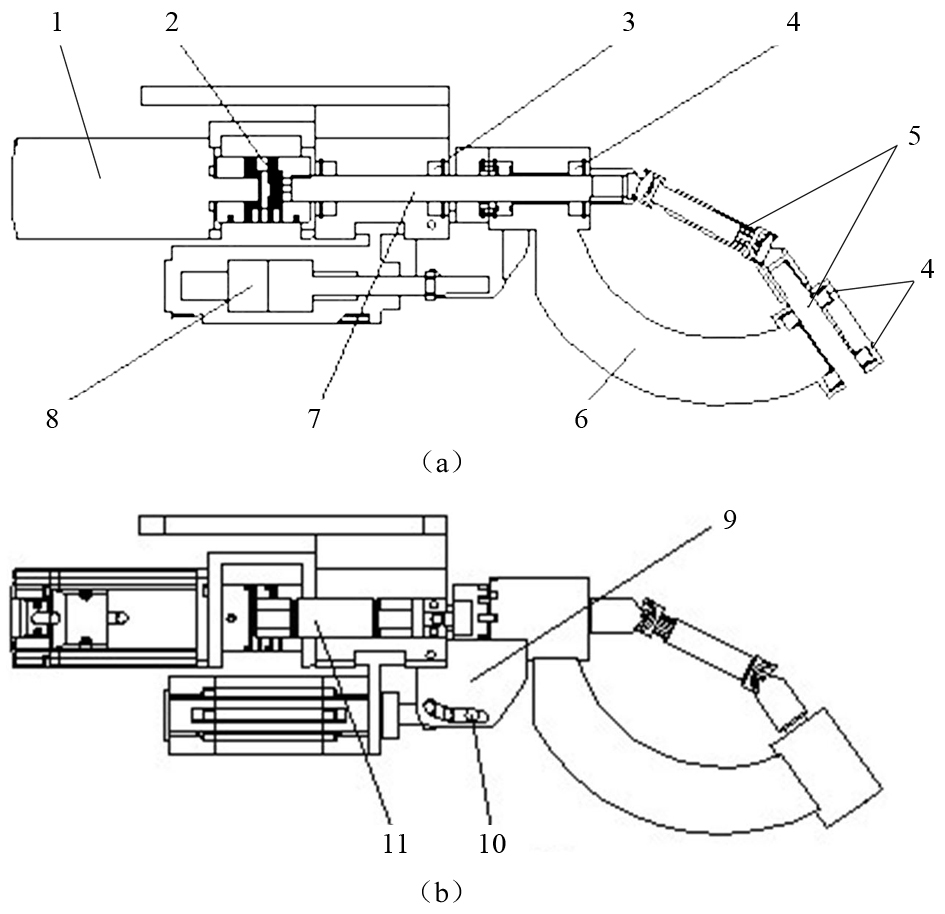
图 3 切换组件结构
1. 旋转电机 2. 联轴器 3. 前端轴承 4. 支撑座轴承 5. 连杆组件6. 支撑座 7. 转轴 8. 顶出气缸 9. 托板 10. 弧形槽与导杆 11. 推动气缸
Figure 3. Structure of switching components

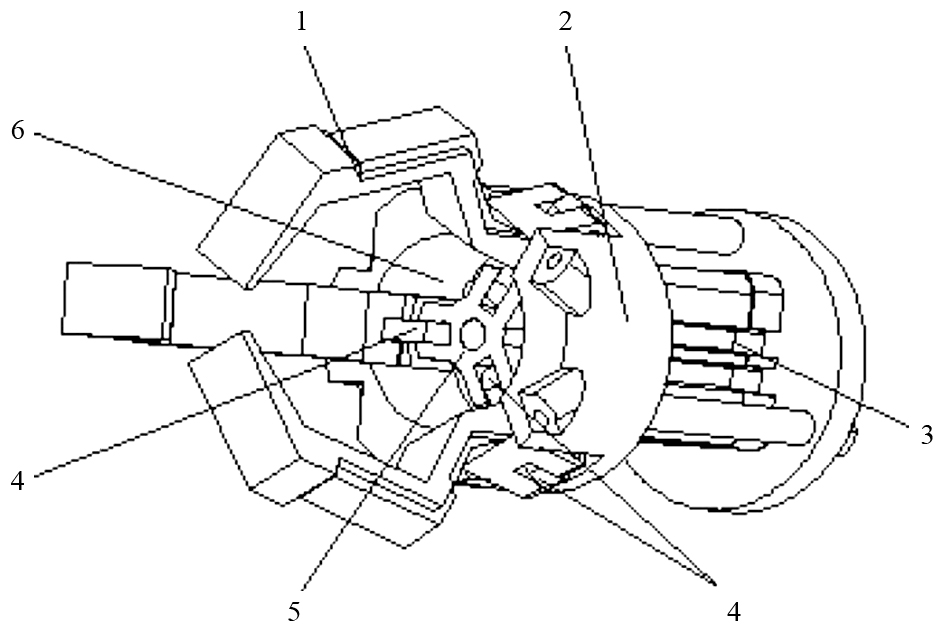
图 4 抓取组件结构
1. 抓取爪 2. 电机座 3. 抓取伸缩电机 4. 连接片5. 伸缩块 6. 内凹槽
Figure 4. Structure of picking components
表 1 果蔬自动化采摘执行装置运动参数范围
Table 1. Range of motion parameters of automatic fruit and vegetable picking actuator
参数名称 参数范围 最大抓取力/N 1 000 可抓取对象半径/mm 80~270 固定组件最大旋转角度/(°) 45 连杆组件最大旋转角度/(°) ±180  下载: 导出CSV
下载: 导出CSV
-
[1] 魏国莲,成全.果蔬自动化采摘机的机械结构设计与试验[J].农机化研究,2020,42(9):117-124. doi: 10.3969/j.issn.1003-188X.2020.09.021WEI Guolian,CHENG Quan.Mechanical structure design and test of automatic fruit and vegetable picker[J].Agricultural Mechanization Research,2020,42(9):117-124. doi: 10.3969/j.issn.1003-188X.2020.09.021 [2] 董芒,顾宝兴,姬长英,等.水果采摘机器人智能移动平台的设计与试验[J].华南农业大学学报,2016,37(4):128-133. doi: 10.7671/j.issn.1001-411X.2016.04.021DONG Mang,GU Baoxing,JI Changying,et al.Design and experiment of an intelligent mobile platform loaded with a fruit picking robot[J].Journal of South China Agricultural University,2016,37(4):128-133. doi: 10.7671/j.issn.1001-411X.2016.04.021 [3] 高文硕,宋卫东,王教领,等.果蔬菌采摘机械研究综述[J].中国农机化学报,2020,41(10):9-15. doi: 10.13733/j.jcam.issn.2095-5553.2020.10.002GAO Wenshuo,SONG Weidong,WANG Jiaoling,et al.Review on fruit,vegetable and fungus picking machinery[J].Joumal of Chinese Agricultural Mechanization,2020,41(10):9-15. doi: 10.13733/j.jcam.issn.2095-5553.2020.10.002 [4] 蒋先平,徐灿,刘丰溥,等.果蔬采摘机器人系统的应用与发展[J].现代农业装备,2021,42(2):2- 8,13. doi: 10.3969/j.issn.1673-2154.2021.02.001JIANG Xianping,XU Can,LIU Fengpu,et al.Application and development of fruit and vegetable picking robot system[J].Modern Agricultural Equipments,2021,42(2):2- 8,13. doi: 10.3969/j.issn.1673-2154.2021.02.001 [5] 苑进.选择性收获机器人技术研究进展与分析[J].农业机械学报,2020,51(9):1-17.YUAN Jin.Research progress analysis of robotics selective harvesting technologies[J].Transactions of the Chinese Society of Agricultural Machinery,2020,51(9):1-17. [6] 农业农村部关于加快推进设施种植机械化发展的意见[Z/OL].(2020-06-27).http://www.gov.cn/zhengce/zhengceku/2020-06/30/content_5522757.htm. [7] 贾江鸣,叶玉泽,程培林,等.细长果蔬采摘软体气动抓手设计与参数优化[J].农业机械学报,2021,52(6):26-34. doi: 10.6041/j.issn.1000-1298.2021.06.003JIA Jiangming,YE Yuze,CHENG Peilin,et al.Design and parameter optimization of soft pneumatic gripper for slender fruits and vegetables picking[J].Transactions of the Chinese Society of Agricultural Machinery,2021,52(6):26-34. doi: 10.6041/j.issn.1000-1298.2021.06.003 [8] 刘凡,杨光友,杨康.农业采摘机器人柔性机械手研究[J].中国农机化学报,2019,40(3):173-178. doi: 10.13733/j.jcam.issn.2095-5553.2019.03.31LIU Fan,YANG Guangyou,YANG Kang.Research on flexible manipulator of agricultural harvesting robot[J].Journal of Chinese Agricultural Mechanization,2019,40(3):173-178. doi: 10.13733/j.jcam.issn.2095-5553.2019.03.31 [9] 付舜,王毅.类球果蔬采摘末端执行器设计及分析[J].湖南农业科学,2017(3):16-19. doi: 10.16498/j.cnki.hnnykx.2017.003.006FU Shun,WANG Yi.Design and analysis of end-effector for spherical fruit and vegetable picking[J].Hunan Agricultural Sciences,2017(3):16-19. doi: 10.16498/j.cnki.hnnykx.2017.003.006 [10] 李国利,姬长英,顾宝兴,等.多末端苹果采摘机器人机械手运动学分析与试验[J].农业机械学报,2016,47(12):14- 21,29. doi: 10.6041/j.issn.1000-1298.2016.12.003LI Guoli,JI Changying,GU Baoxing,et al.Kinematics analysis and experiment of apple harvesting robot manipulator with multiple end-effectors[J].Transactions of the Chinese Society of Agricultural Machinery,2016,47(12):14- 21,29. doi: 10.6041/j.issn.1000-1298.2016.12.003 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 41
- HTML全文浏览量: 11
- PDF下载量: 10
- 被引次数: 0
 京公网安备 11010502037498号
京公网安备 11010502037498号
