

Design of Chassis Transmission and Steering System for Hilly Tractor
-
摘要:
针对拖拉机在丘陵山区适应性差,田间地头转向半径大、易损害作物,耗时长和效率低等问题,设计了一种可原地转向的504型丘陵山地拖拉机底盘。整机采用四驱轮式行走系统,前进和后退速度为0~5 km/h,可无级调速。传动系统采用机械式“H”型传动路线,通过纵梁内外双轴的设计将左右两侧的驱动力独立分开。采用离合器式转向分动器,通过转向分动箱内的牙嵌式离合器两两组合,完成底盘不同作业状态的控制,两路动力通过正转+正转、反转+反转、正转+反转和反转+正转4种状态的组合,实现拖拉机的前进、倒退、左右大小半径转向和原地转向。结果表明,整机最大牵引力为10.78 kN,最大及最小总传动比分别为732.50和73.25,前后驱动桥传动轴最高及最低转速分别为31.07和6.21 r/min。底盘的轮距和轴距比值为1,其所受滑移阻力矩与滚动阻力矩之和小于其所受驱动力矩,可在窄小地头实现原地转向,减小拖拉机田间作业的空行程,提高作业效率,有效保护农作物。
Abstract:Aiming at problems of poor adaptability of tractors in hilly and mountainous areas, large turning radius in field, easy to damage crops, long time-consuming and low efficiency, a 504-type hilly tractor chassis that could turn in situ was designed.Whole machine adopted a four-wheel drive walking system, with forward and backward speeds of 0-5 km/h and stepless speed regulation.Transmission system adopted mechanical "H" transmission route, and driving forces on the left and right sides were separated independently through design of inner and outer double shafts of longitudinal beam.Clutch type steering transfer gear was used to complete control of different working states of chassis through combination of two tooth type clutches in steering transfer box.The two-way power realized the forward, reverse, left and right radius steering and in-situ steering of tractor through combination of four states: forward rotation + forward rotation, reverse rotation + reverse rotation, forward rotation + reverse rotation, reverse rotation + forward rotation.Results showed that the maximum traction force of whole machine was 10.78 kN, the maximum and minimum total transmission ratios were 732.50 and 73.25, respectively.The maximum and minimum speeds of front and rear drive axle drive shafts were 31.07 and 6.21 r/min, respectively.Ratio of wheelbase to wheelbase of chassis was equal to 1, and sum of sliding resistance moment and rolling resistance moment of chassis was less than driving moment of chassis, which could realize in-situ steering in narrow ground, reduce empty travel of tractor in field operation, improve operation efficiency and effectively protect crops.
-
Keywords:
- hilly tractor /
- transmission system /
- steering system /
- spin turn
-
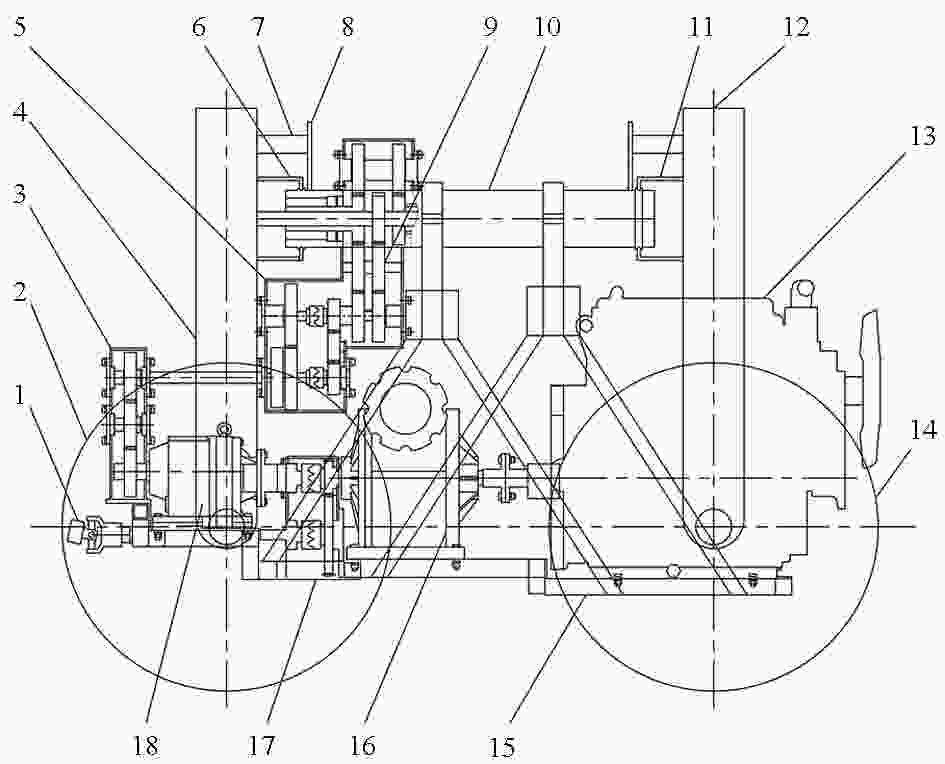
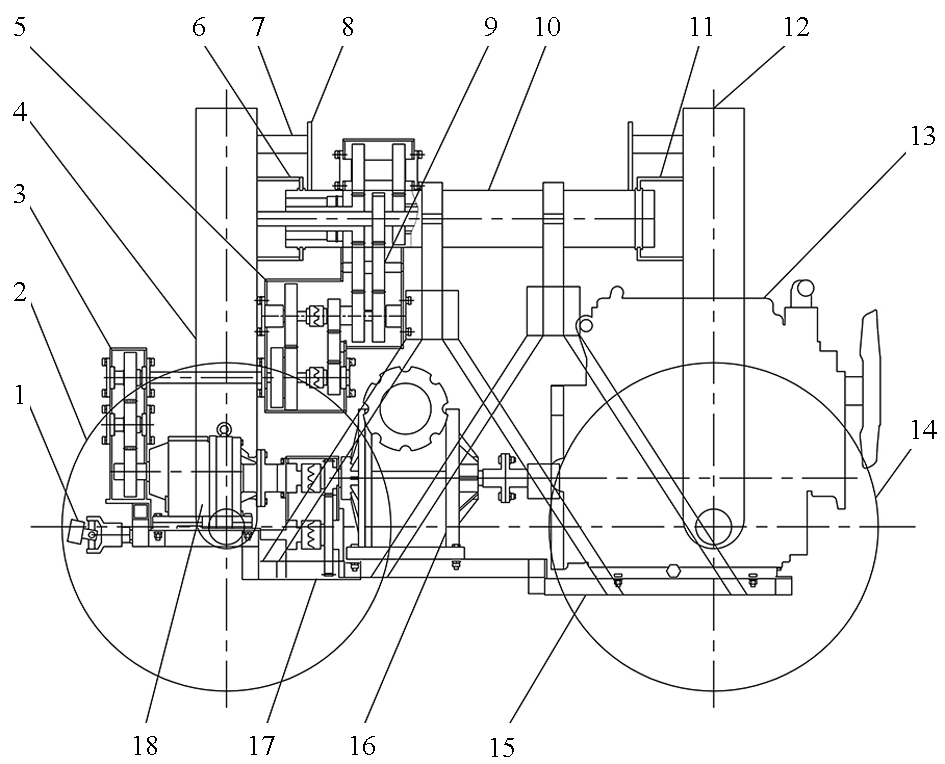
图 1 504型丘陵山地拖拉机整体结构
1. 动力输出 2. 后驱动轮 3. 齿轮传动箱 4. 后轮边传动箱 5. 转向分动箱 6. 后驱动桥 7. 上梁 8. 连接架 9. 制动装置 10. 纵梁车架11. 前驱动桥 12. 前轮边传动箱 13. 发动机 14. 前驱动轮 15. 机架16. 无级变速箱 17. 齿轮减速控制箱 18. 减速器
Figure 1. Overall structure of 504-type hilly tractor

图 2 504型丘陵山地拖拉机总体传动路线
Figure 2. Overall transmission route of 504-type hilly mountain tractor

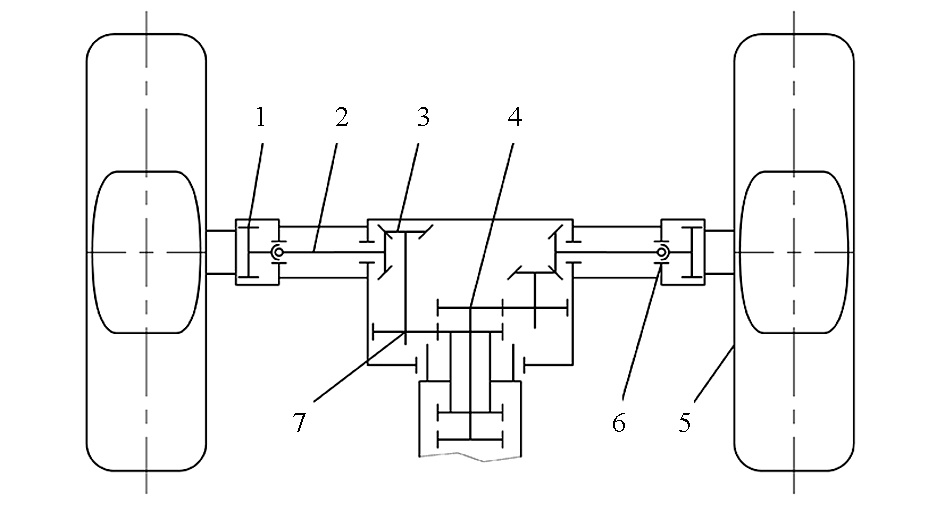
图 4 驱动桥和中央传动结构
1. 轮边直齿轮 2. 驱动半轴 3. 换向锥齿轮 4. 实心轴 5. 轮胎6. 等速万向节 7. 空心轴动力输出
Figure 4. Structure of drive axle and central transmission

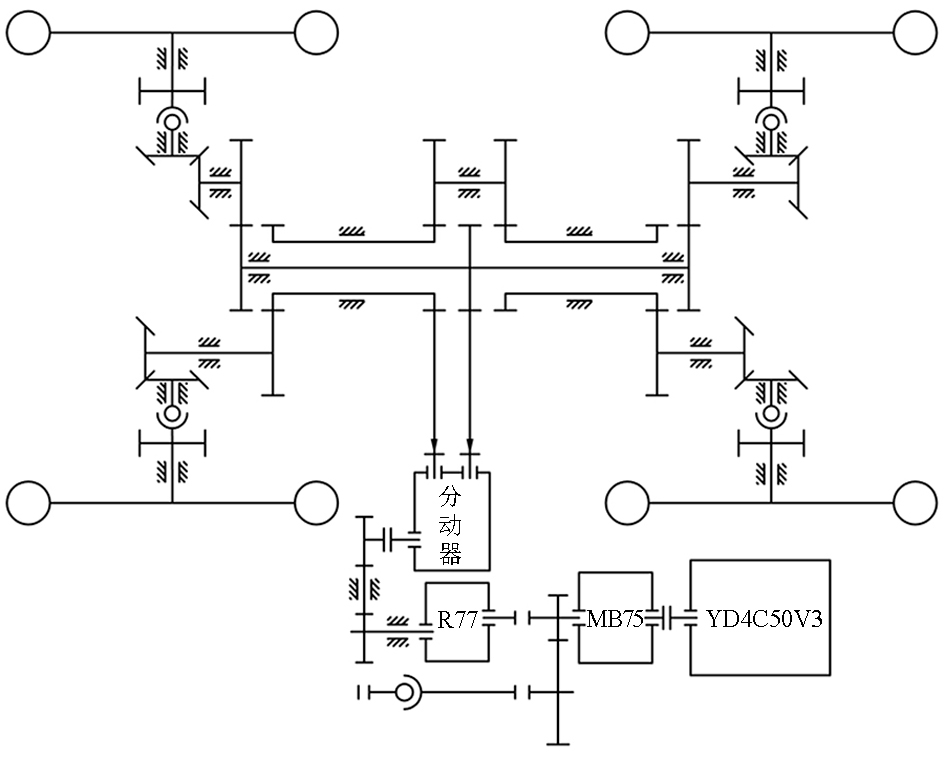
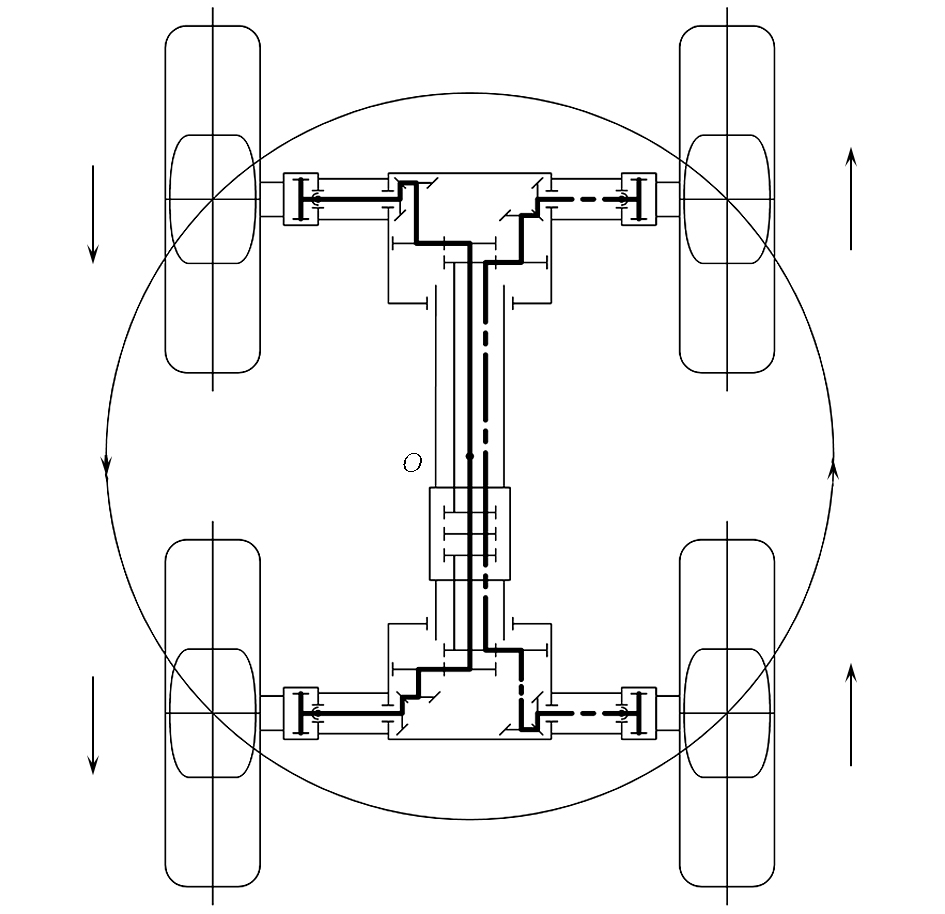
图 5 504型丘陵山地拖拉机原地转向传动系统
注:实线传动路线为底盘左侧驱动力,虚线传动路线为底盘右侧驱动力
Figure 5. In-situ steering transmission system of 504-type hilly mountain tractor

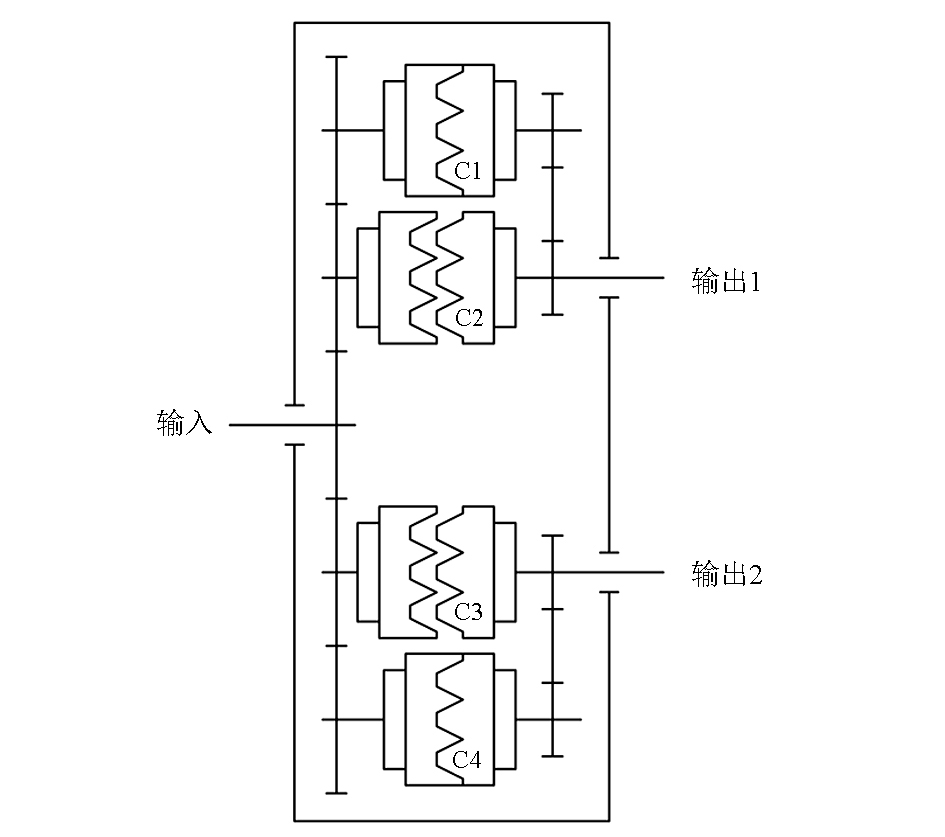
图 6 转向分动器机构展开示意
Figure 6. Schematic diagram of expansion of steering transfer mechanism

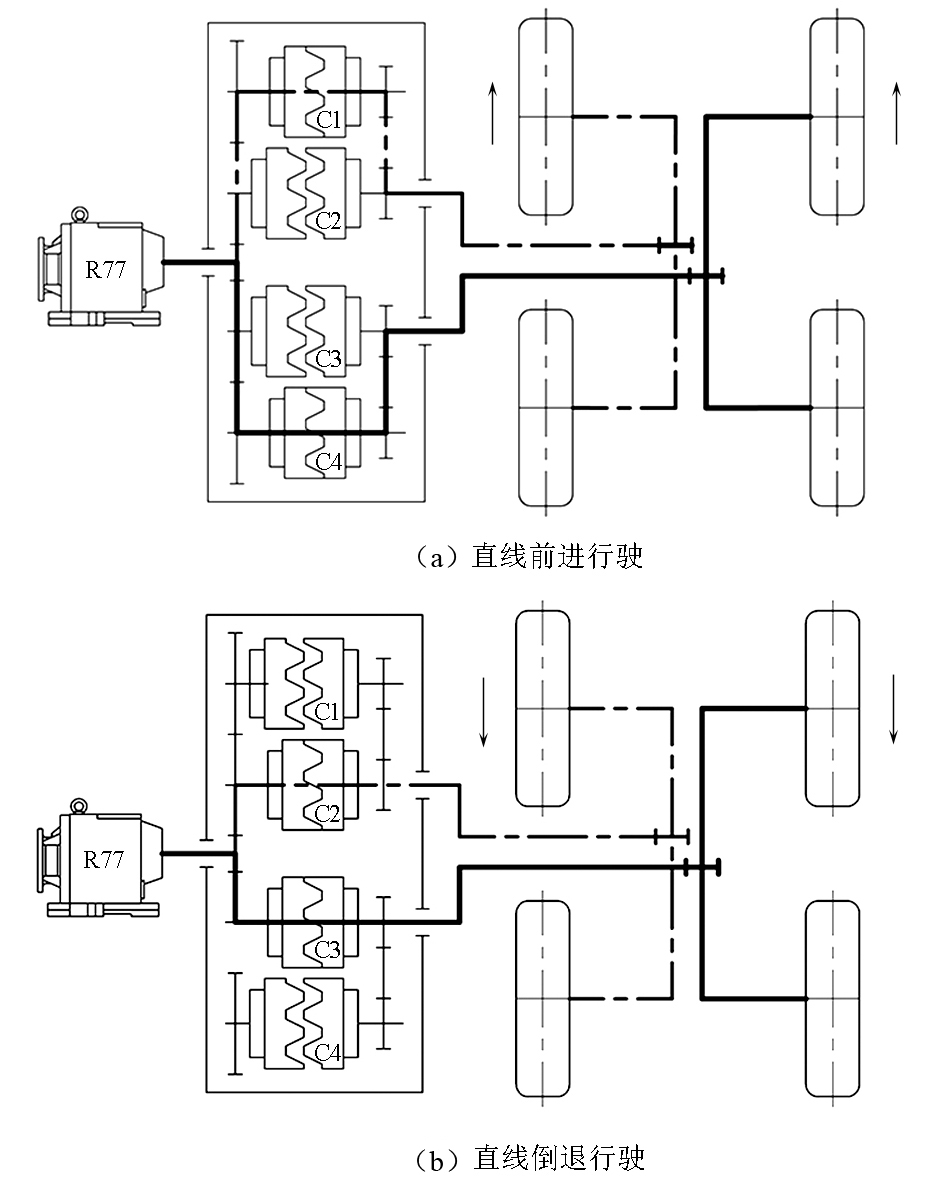
图 7 转向分动器直线行驶传动原理
Figure 7. Steering transfer case linear driving transmission principle

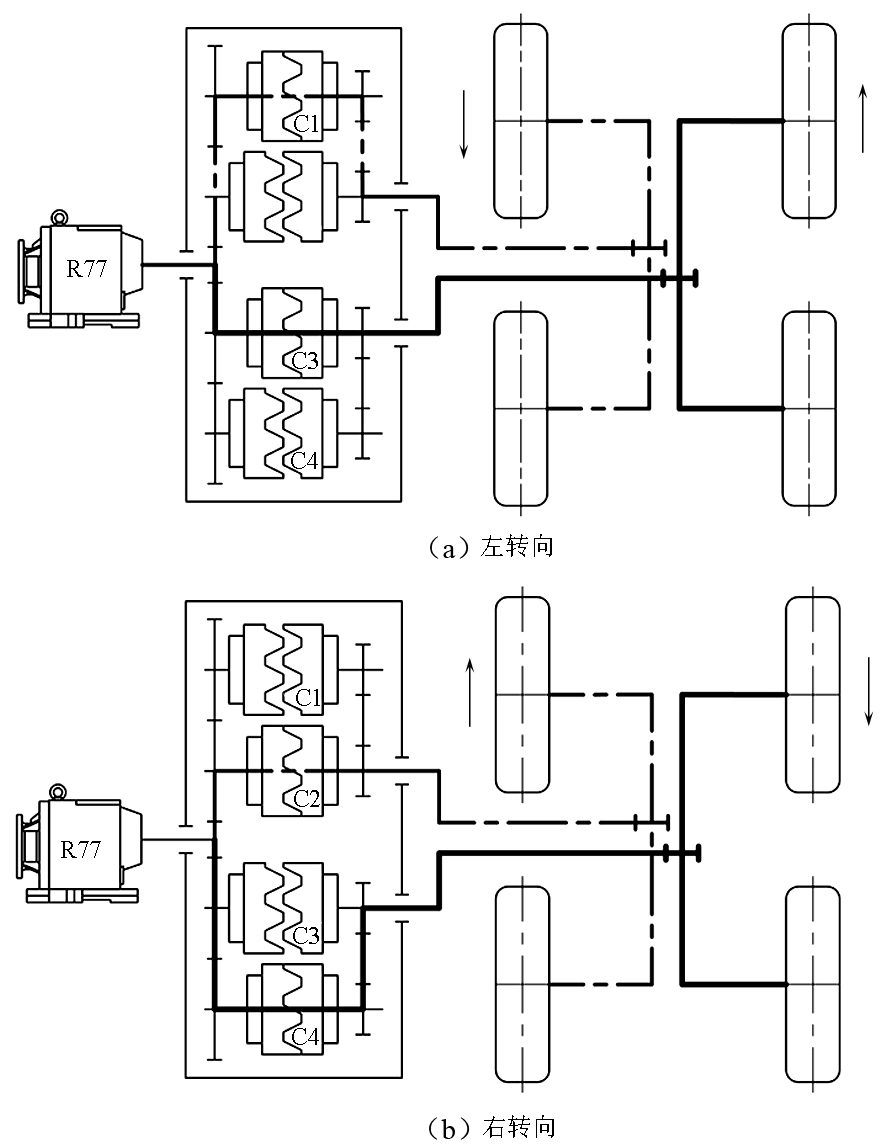
图 8 转向分动器原地转向传动原理
Figure 8. Steering transfer case in-place steering transmission principle
表 1 各级传动比分配方案
Table 1. Distribution plan of transmission ratios at all levels
传动方式 无级变速箱 主减速器 动力输出减速器 中央传动 低—高 传动比 1.00~5.00 77.24 2.40 1.00  下载: 导出CSV
下载: 导出CSV
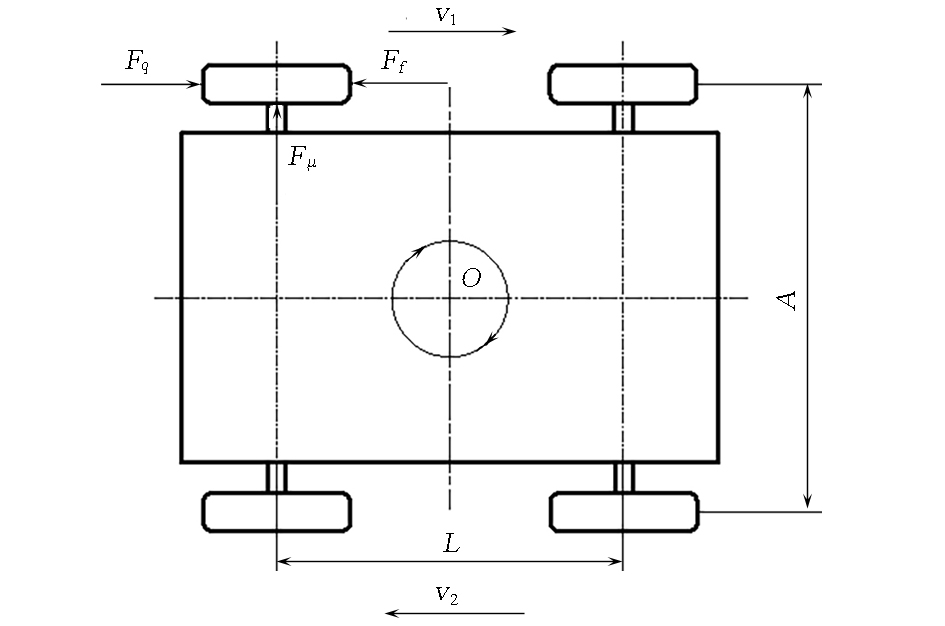
表 2 转向机构不同工况分析
Table 2. Analysis of different working conditions of steering mechanism
转向形式 离合器组合状态 内外轴转向 左右驱动轮 直线前进行驶(R=∞) 接合C1、C4,断开C2、C3 轴1正转,轴2正转 同向等速 直线倒退行驶(R=∞) 接合C2,C3,断开C1、C4 轴1反转,轴2反转 同向等速 原地左转向(R=0) 接合C1、C3,断开C2、C4 轴1正转,轴2反转 反向等速 原地右转向(R=0) 接合C2、C4,断开C1、C3 轴1反转,轴2正转 反向等速 大小半径左转向(0≤R≤A/2)&(R≥A/2) 接合C1、C3,断开C2、C4 轴1正转,轴2反转 反向等速 大小半径右转向(0≤R≤A/2)&(R≥A/2) 接合C2、C4,断开C1、C3 轴1反转,轴2正转 反向等速 注:R为底盘转向半径,mm;A为两驱动轮中心距,mm。
下载: 导出CSV
-
[1] 罗锡文.对发展丘陵山区农业机械化的思考[J].农机科技推广,2011(2):17-20. [2] 郑永军,江世界,陈炳太,等.丘陵山区果园机械化技术与装备研究进展[J].农业机械学报,2020,51(11):1-20.ZHENG Yongjun,JIANG Shijie,CHEN Bingtai,et al.Review on technology and equipment of mechanization in hilly orchard[J].Transactions of the Chinese Society for Agricultural Machinery,2020,51(11):1-20. [3] 夏长高,杨宏图,韩江义,等.山地拖拉机调平系统的研究现状及发展趋势[J].中国农业大学学报,2018,23(10):130-136.XIA Changgao,YANG Hongtu,HAN Jiangyi,et al.Research status and development trend of hilly mountain tractor leveling system[J].Journal of China Agricultural University,2018,23(10):130-136. [4] SIMIONESCU P A,TALPASANU I.Synthesis and analysis of the steering system of an adjustable tread-width four-wheel tractor[J].Mechanism and Machine Theory,2007,42(5):526-540. doi: 10.1016/j.mechmachtheory.2006.06.001 [5] TIAN Guangzhao,GU Baoxing,CHEN Kai,et al.Method of automatic steering system design and parameter optimisation for small tractors[J].The Journal of Engineering,2019,2019(22): 8353 - 8358. doi: 10.1049/joe.2019.1079 [6] SPENTZAS K N,ALKHAZALI I,DEMIC M.Dynamics of four-wheel-steering vehicles[J].Forschung im Ingenieurwesen,2001,66(6):260-266. doi: 10.1007/s100100100061 [7] MAKHAROBLIDZE R M,LAGVILVAVA I M,BASILASHVILI B B,et al.Theory of turn bodies of mountain tandem wheeled self-propelled chassis[J].Annals of Agrarian Science,2017,15(3):339-343. doi: 10.1016/j.aasci.2017.05.026 [8] 冯江,蒋亦元.水稻联合收获机单边驱动原地转向机构的机理与性能试验[J].农业工程学报,2013,29(4):30-35.FENG Jiang,JIANG Yiyuan.Mechanism and performance test of pivot turning system with single driving for rice combine harvester[J].Transactions of the Chinese Society of Agricultural Engineering,2013,29(4):30-35. [9] 冯雪.丘陵山地拖拉机四轮转向系统特性研究[D].长春: 吉林大学, 2018.FENG Xue.Research on characteristics of four-wheel steering system in hillside tractor[D].Changchun: Jilin University, 2018. [10] 罗锡文.补短板 促全面 提升我国农业机械化发展水平[J].现代农业装备,2017(5):8-12. [11] 农业轮胎规格、尺寸、气压与负荷: GB/T 2979—2017[S]. [12] 蒋立,解晓琳,莫秋云,等.利用传统拖拉机改制的四驱移动底盘单侧越障性能分析[J].农业装备与车辆工程,2020,58(11):14- 18,28.JIANG Li,XIE Xiaolin,MO Qiuyun,et al.Performance analysis of one-side obstacle surmounting of four-wheel drive mobile chassis modified from traditional tractor[J].Agricultural Equipment and Vehicle Engineering,2020,58(11):14- 18,28. [13] 高墨尧.丘陵山地农机动力底盘及车身调平装置研究[D].长春: 吉林农业大学, 2017.GAO Moyao.Study on the agricultural machinery of powered chassis and body leveling device of hilly mountainous[D].Changchun: Jilin Agricultural University, 2017. [14] 程悦荪.拖拉机设计[M].北京: 机械工业出版社, 1992. [15] 徐峰,刘德普.浅析轮式拖拉机“大马拉小车”现象[J].农业机械,2018(10):65-67. [16] 李江,王玉亮,李瑞川,等.丘陵山地四轮驱动拖拉机驱动力主动分配系统研究[J].农机化研究,2019,41(8):227-235.LI Jiang,WANG Yuliang,LI Ruichuan,et al.Research on driving force active distribution system of four-wheel drive tractor in hilly area[J].Journal of Agricultural Mechanization Research,2019,41(8):227-235. [17] 王善恩.果园通用底盘动力特性试验研究[D].保定: 河北农业大学, 2015.WANG Shanen.Experimental study on dynamic characteristics of orchard general chassis[D].Baoding: Hebei Agricultural University, 2015. [18] 机械电子工业部洛阳拖拉机研究所.拖拉机设计手册(上册)[M].北京: 机械工业出版社, 1994. [19] 孙恒, 陈作模, 葛文杰.机械原理[M].7版.北京: 高等教育出版社, 2006, 188-189. [20] 王金武,唐汉,沈红光,等.高地隙折腰式水田多功能动力底盘设计与试验[J].农业工程学报,2017,33(16):32-40.WANG Jinwu,TANG Han,SHEN Hongguang,et al.Design and experiment of high clearance roll-waist multifunctional power chassis for paddy field[J].Transactions of the Chinese Society of Agricultural Engineering,2017,33(16):32-40. [21] 王培通.四轮驱动船式拖拉机传动系统设计与试验研究[D].武汉: 华中农业大学, 2018.WANG Peitong.Design and experiment of all-wheel transmission system based on belt drive[D].Wuhan: Central China Agricultural University, 2018. [22] JIANG Yong.The dynamic characteristic analysis of full hydraulic steering system in large mining truck[J].Applied Mechanics and Materials,2013,2755(433/434/435):59-62. [23] 范永超,柳波,刘相,等.滑移装载机原地转向动力学分析[J].机床与液压,2015,43(8):65-67.FAN Yongchao,LIU Bo,LIU Xiang,et al.Dynamics analysis of pivot turning of skid-steer lorder[J].Machine Tool & Hydraulics,2015,43(8):65-67. [24] 康亚彪,李庆杰,高世卿,等.四轮野外无人车中心转向计算分析[J].北京汽车,2020(6):44- 45,53. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 47
- HTML全文浏览量: 16
- PDF下载量: 12
- 被引次数: 0
 京公网安备 11010502037498号
京公网安备 11010502037498号
