

Design on Execution Components of Remote Control System for Rotary Tillage Machine Based on STM32
-
摘要:
随着农业机械技术不断发展,传统农机出现诸多不足,如操作难度较高、操作舒适性较差等,远程控制无人驾驶能有效解决以上诸多问题。以旋耕机为例,基于STM32,设计了其左右转向执行机构、行走离合执行机构、换挡执行机构、副变速挡执行机构及刀轴传动执行机构,实现对旋耕机的远程控制。
Abstract:With continuous development of agricultural machinery technology, traditional agricultural machinery has many shortcomings, such as high operational difficulty and poor comfort.Remote control and unmanned driving can effectively solve many of these problems.Taking rotary tiller as an example, its left and right steering actuator, walking clutch actuator, shift actuator, auxiliary transmission actuator, and blade shaft transmission actuator were designed to achieve remote control of rotary tiller.
-
Keywords:
- rotary cultivator /
- remote control /
- executive components /
- STM32 /
- stay wire
-
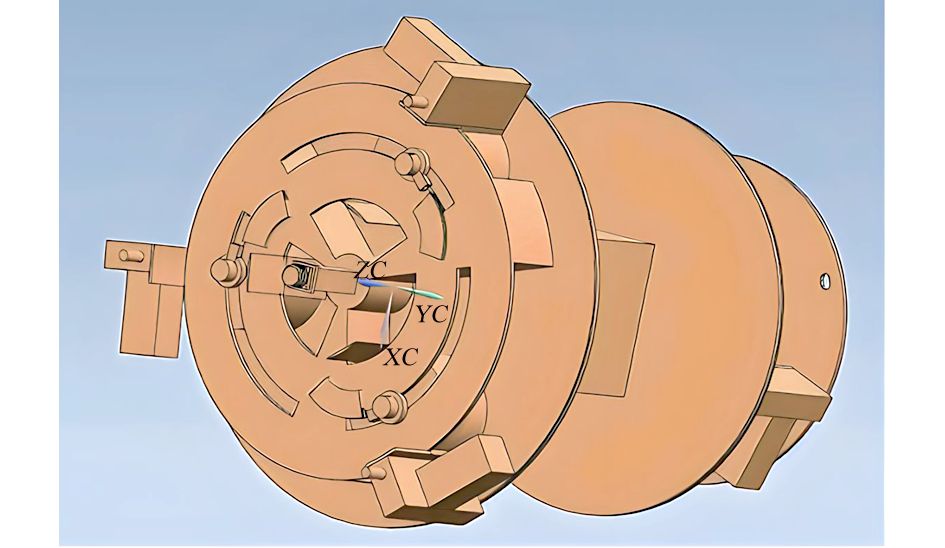
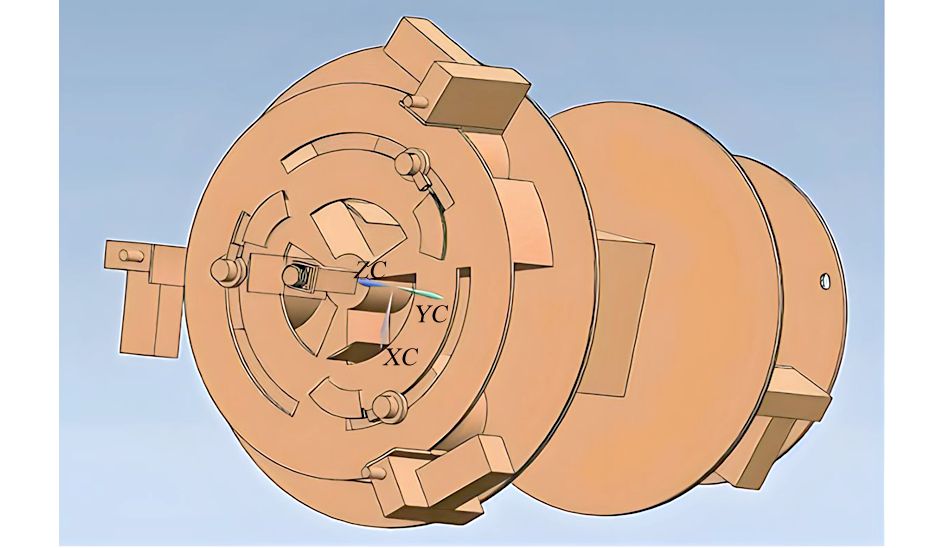
图 1 换向、离合拉线等控制机构示意
Figure 1. Schematic diagram of shift lever,clutch cable and other control mechanisms
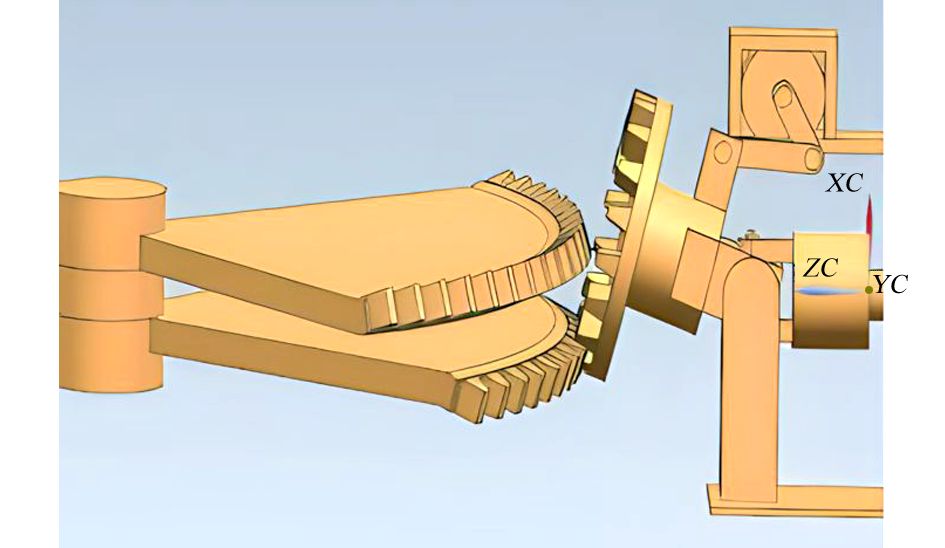
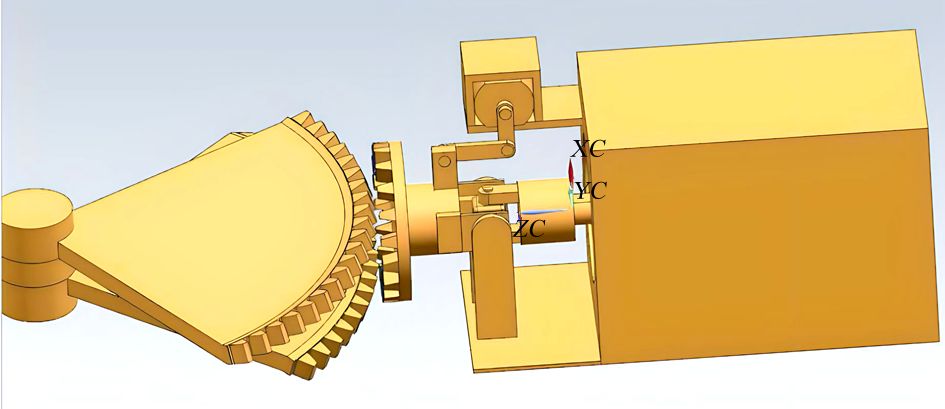
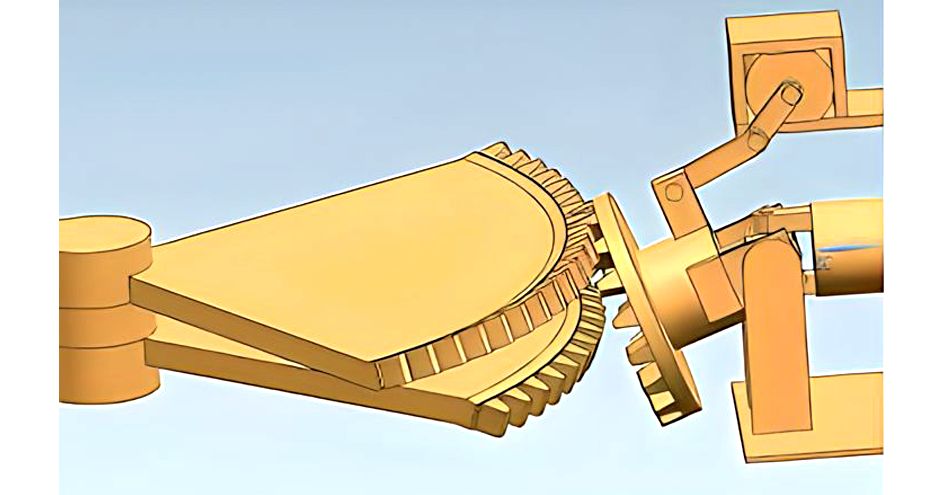
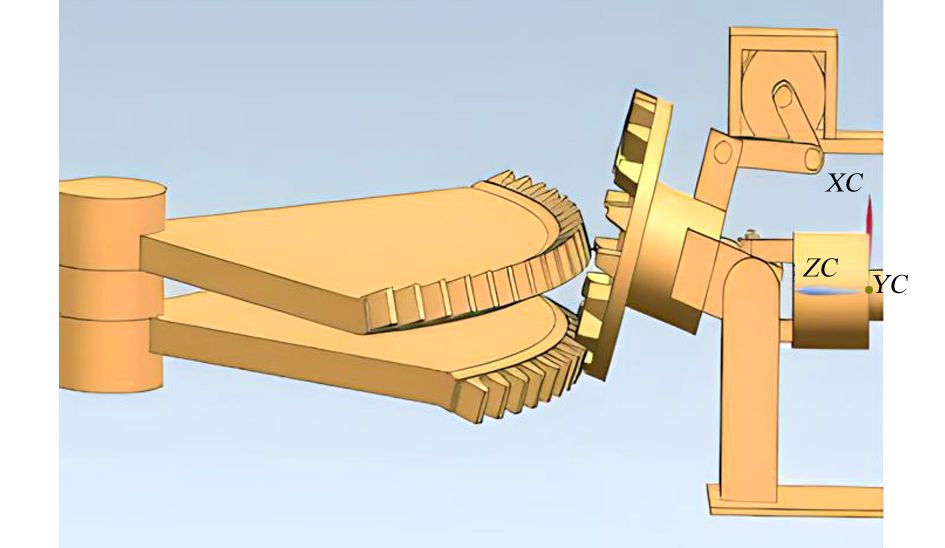
图 5 副变速切换结构示意
Figure 5. Schematic diagram of secondary transmission switching structure
表 1 换向、离合拉线等数据
Table 1. Shifting,clutch cable and other related data
执行动作 拉线工作长度L/mm 转动圆心角θ/(°) 所需工作半径R/mm 保持运动拉力F/N 所需力矩T/( N·m−1) 左右转向 40 45 51 120 6.12 行走离合 40 45 51 100 5.10 刀轴转动 20 45 26 150 3.90  下载: 导出CSV
下载: 导出CSV
表 2 换挡拉线工作数据
Table 2. Shift lever cable data
执行操作 转过角度n/(°) 转动半径R/mm 保持运动拉力F/N 副变速 20 80 200 换挡 37 80 200
下载: 导出CSV
-
[1] 杜兆辉,陈彦宇,张姬,等.国内外旋耕机械发展现状与展望[J].中国农机化学报,2019,40(4): 43 - 47 .DU Zhaohui,CHEN Yanyu,ZHANG Ji,et al.Development status and prospects of rotary farm machinery in domestic and abroad[J].Journal of Chinese Agricultural Mechanization,2019,40(4): 43 - 47 . [2] 岳威.基于5G技术的农业机械遥控系统设计[J].南方农机,2023,54(1): 69 - 71 . doi: 10.3969/j.issn.1672-3872.2023.01.019 [3] 张俊杰,张西群,马力,等.履带式遥控作业机使用介绍与故障排除[J].河北农机,2022(5): 13 - 15 . [4] 孙永佳,窦青青,孙宜田,等.基于Cortex-M3的丘陵山地拖拉机遥控系统设计[J].中国农机化学报,2020,41(6): 137 - 142 .SUN Yongjia,DOU Qingqing,SUN Yitian,et al.Design of remote control system in hilly tractor based on Cortex-M3[J].Journal of Chinese Agricultural Mechanization,2020,41(6): 137 - 142 . [5] 潘志国,纪国宁,张圣龙,等.基于STC15的5G电动农业机械遥控系统设计[J].自动化仪表,2022,43(2): 76 - 81,87 .PAN Zhiguo,JI Guoning,ZHANG Shenglong,et al.Design of 5G electric agricultural machinery remote control system based on STC15[J].Process Automation Instrumentation,2022,43(2): 76 - 81,87 . [6] 李昊伦,胡佳宁,詹宇,等.基于STM32的多功能遥控农业车控制系统设计[J].农机化研究,2020,42(2): 261 - 264,268 . doi: 10.3969/j.issn.1003-188X.2020.02.051LI Haolun,HU Jianing,ZHAN Yu,et al.Design of control system based on STM32 multi-function remote agriculture vehicle[J].Agricultural Mechanization Research,2020,42(2): 261 - 264,268 . doi: 10.3969/j.issn.1003-188X.2020.02.051 [7] 沈真诚,王甜.旋耕机遥控驾驶与自动调平技术[J].农机使用与维修,2023(5): 83 - 85 .SHEN Zhencheng,WANG Tian.Rotary tiller remote control driving and automatic leveling technology[J].Agricultural Machinery Use and Maintenance,2023(5): 83 - 85 . [8] 赵群喜,王海霞,弋晓康,等.果园避障旋耕机的设计与试验分析[J].农机化研究,2022,44(1): 97 - 100,106 .ZHAO Qunxi,WANG Haixia,YI Xiaokang,et al.Design and experimental analysis of orchard avoidance rotary cultivator[J].Journal of Agricultural Mechanization Research,2022,44(1): 97 - 100,106 . [9] 林静,王东锐,吕洲翼,等.果园整地旋耕机智能避障系统设计与试验[J].沈阳农业大学学报,2023,54(2): 165 - 175 .LIN Jing,WANG Dongrui,LV Zhouyi,et al.Design and experimental study on intelligent obstacle avoidance system for orchard rototiller[J].Journal of Shenyang Agricultural University,2023,54(2): 165 - 175 . [10] 张晋,陈伟,朱继平,等.果园自动避障中耕除草管理机设计与试验[J].中国农机化学报,2020,41(8): 40 - 49 .ZHANG Jin,CHEN Wei,ZHU Jiping.Design and experiment of automatic obstacle avoidance cultivation weeding management machine[J].Journal of Chinese Agricultural Mechanization,2020,41(8): 40 - 49 . [11] 王健,张秀花,张江红.果园旋耕机的研究现状与分析[J].河北农机,2021(3): 22 - 23 . -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 31
- HTML全文浏览量: 10
- PDF下载量: 8
- 被引次数: 0
 京公网安备 11010502037498号
京公网安备 11010502037498号
