

Path Planning Method for Combine Harvester Operations Based on Machine Vision
-
摘要:
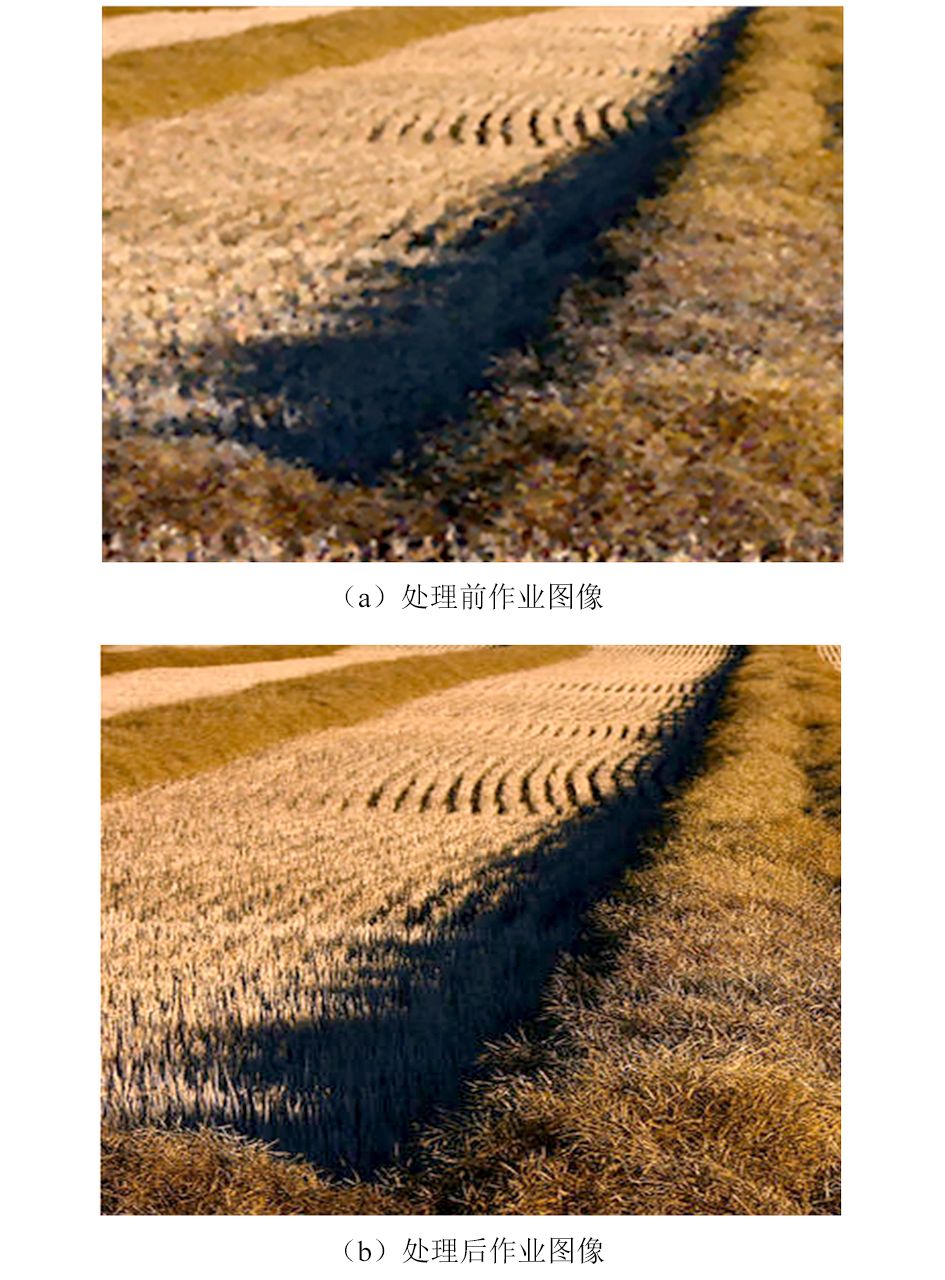
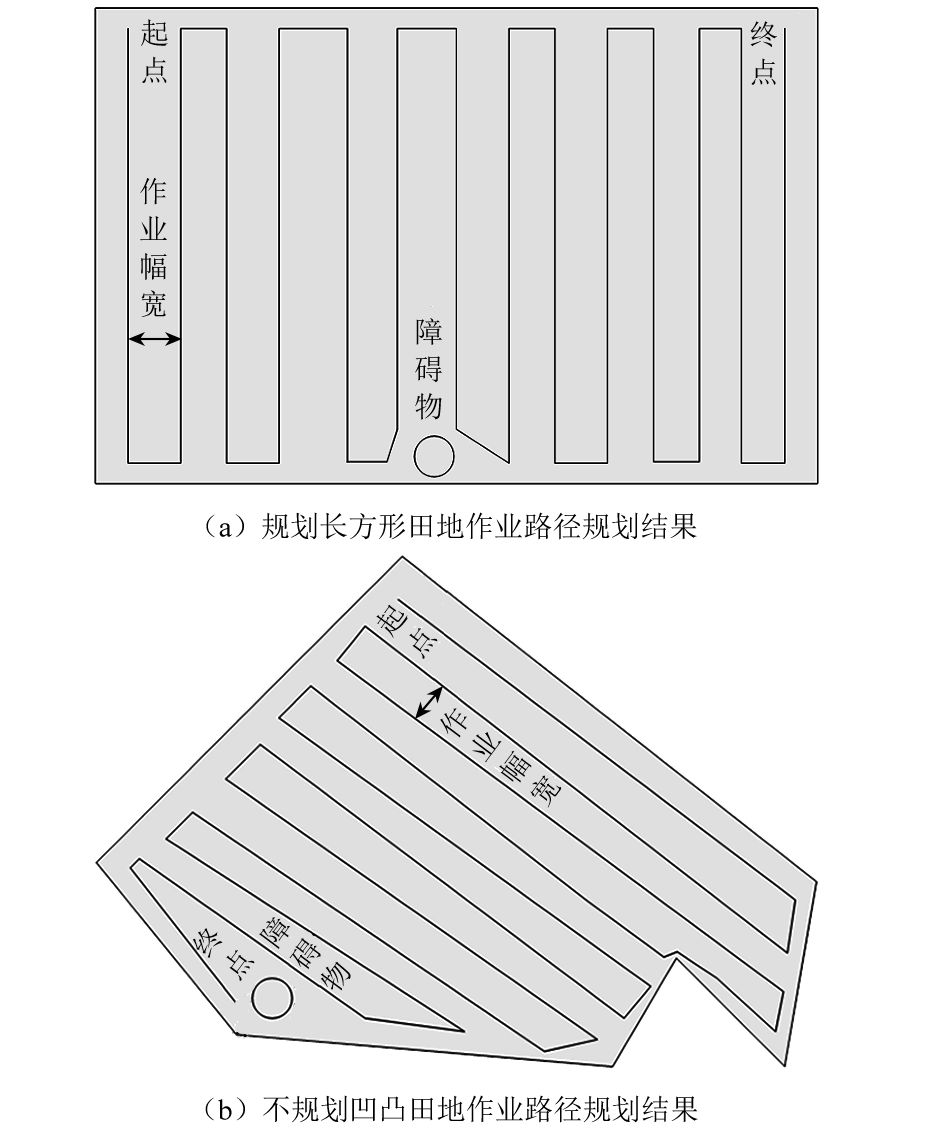
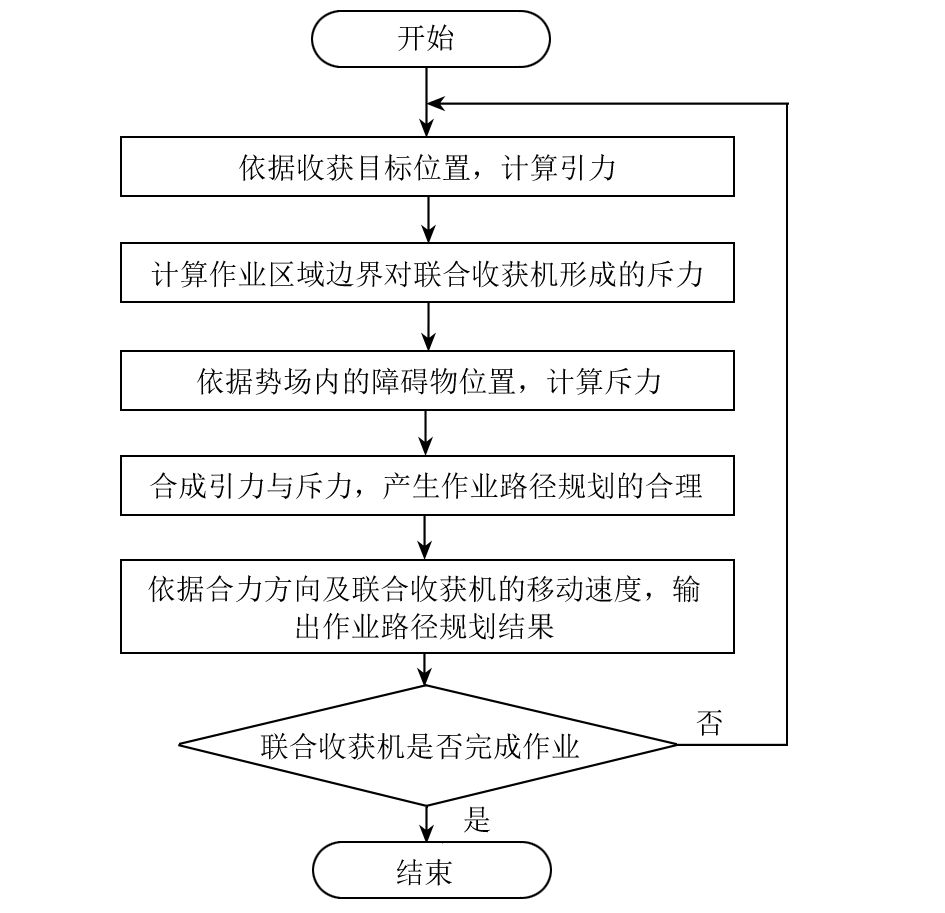
研究了基于机器视觉的联合收获机作业路径规划方法,解决联合收获机作业环境中因障碍物过多影响作业效率的问题。利用双目视觉相机采集联合收获机作业图像,选取九点标定法进行双目视觉相机的手眼标定。采用Canny算法利用高斯滤波器平滑处理图像,计算图像的梯度方向与幅值,利用双阈值连接联合收获机作业图像边缘,检测联合收获机作业图像边缘,划分收获目标与障碍物。依据人工势场法原理,利用联合收获机作业的环境信息构建一个势场。合成势场内联合收获机受到的引力与斥力,依据联合收获机的移动速度及合力方向,输出联合收获机的作业路径规划结果。试验结果表明,该方法可以依据联合收获机的作业环境,规划作业路径,有效规避障碍物,适应性好。
Abstract:Path planning method for combine harvester operations based on machine vision was studied to address issue of excessive obstacles affecting operational efficiency in combine harvester operating environment.Binocular vision camera was used to collect images of combine harvester operations, and nine point calibration method was selected for hand eye calibration of binocular vision camera.Canny algorithm was used to smooth image using a Gaussian filter, calculate gradient direction and amplitude of image, connect edges of combine operation image with dual thresholds, detect edges of combine operation image, and divide harvesting target and obstacles.Based on principle of artificial potential field method, a potential field was constructed using environmental information of combine harvester operation.Gravitational and repulsive forces received by combine harvester in synthetic potential field, based on movement speed and resultant direction of combine harvester, operation path planning results of combine harvester were output.Experimental results showed that, this method could plan operation path based on working environment of combine harvester, and planning results of operation path effectively avoid obstacles, with high applicability.
-
表 1 4DL-5A型履带式联合收获机主要参数
Table 1. Detailed parameters of 4DL-5A tracked combine harvester
参数名称 数值 割台宽度/mm 2200 履带轨距/mm 1150 功率/kW 74.5 发动机额定转速/(r·min−1) 2400 粮箱容量/L 1500 作业速度/(km·h−1) 0~6.8 作业效率/(hm²·h−1) 0.2~0.5 最小离地间隙/mm 175 单位面积油耗/(kg·hm−2) 21~36  下载: 导出CSV
下载: 导出CSV
表 2 联合收获机作业覆盖率测试结果
Table 2. Test results of combined harvester operation coverage
田地类型 作业面积/m2 作业覆盖率/% 有效作业路径占比/% 四边形田地 500 93.8 95.4 1000 94.5 94.8 1500 95.7 95.6 2000 94.8 96.4 椭圆形田地 500 95.7 92.4 1000 93.6 94.7 1500 94.8 96.8 2000 95.8 95.7
下载: 导出CSV
-
[1] 訾涛.割草机器人路径规划的研究:基于机器视觉和人工势场算法[J].农机化研究,2021,43(7):202-206.ZI Tao.Research on path planning of lawn cutting robot based on machine vision and artificial potential field algorithm[J].Journal of Agricultural Mechanization Research,2021,43(7):202-206. [2] 张宗毅,戚山明,张萌.全国小麦联合收割机跨区作业空间流动规律[J].农业工程学报,2021,37(23): 19 - 27 .ZHANG Zongyi,QI Shanming,ZHANG Meng.Spatial flow law of cross-regional operation of wheat combine harvesters in China[J].Transactions of the Chinese Society of Agricultural Engineering,2021,37(23): 19 - 27 . [3] 付景静,王晨升,才福友,等.联合收割机行走半轴频域疲劳分析方法的对比研究[J].机械强度,2022,44(1): 203 - 214 .FU Jingjing,WANG Chensheng,CAI Fuyou,et al.Comparative study on frequency domain fatigue analysis methods for half axle of combine harvester[J].Journal of Mechanical Strength,2022,44(1): 203 - 214 . [4] 陈小亮,赵思夏,宋昊,等.工况传递路径分析的联合收割机座椅振动研究[J].河南科技大学学报(自然科学版),2022,43(3): 24 - 30 .CHEN Xiaoliang,ZHAO Sixia,SONG Hao,et al.Research on seat vibration of combine harvester based on operational transmission path analysis[J].Journal of Henan University of Science and Technology (Natural Science Edition),2022,43(3): 24 - 30 . [5] 姜洪远,杨光友,刘浪,等.基于SAE-DBN的联合收割机液压系统运行状态监测[J].液压与气动,2022,46(4): 59 - 70 . doi: 10.11832/j.issn.1000-4858.2022.04.008JIANG Hongyuan,YANG Guangyou,LIU Lang,et al.Condition monitoring in hydraulic system of combine harvester based on SAE-DBN[J].Chinese Hydraulics & Pneumatics,2022,46(4): 59 - 70 . doi: 10.11832/j.issn.1000-4858.2022.04.008 [6] 穆元杰,尚明华,王富军,等.履带式作业装备自主导航路径规划方法研究[J].农机化研究,2023,45(4): 48 - 51,56 .MU Yuanjie,SHANG Minghua,WANG Fujun,et al.Research on autonomous navigation path planning method for crawler operation equipment[J].Journal of Agricultural Mechanization Research,2023,45(4): 48 - 51,56 . [7] 黄小毛,张垒,王绍帅,等.凸多边形田块下油菜联合直播机组作业路径规划[J].农业机械学报,2022,53(1): 33 - 40,150 .HUANG Xiaomao,ZHANG Lei,WANG Shaoshuai,et al.Path planning of rapeseed combine seeder in field of convex boundary[J].Transactions of the Chinese Society for Agricultural Machinery,2022,53(1): 33 - 40,150 . [8] 史亚贝.基于振动信号分析的联合收割机故障检测系统研究[J].农机化研究,2023,45(5): 249 - 253 .SHI Yabei.Research on fault detection system for combine harvester based on vibration signal analysis[J].Journal of Agricultural Mechanization Research,2023,45(5): 249 - 253 . [9] 杨俊茹,荆本雨,李瑞川,等.联合收割机收割分离液压系统的性能监控研究[J].机床与液压,2021,49(9): 83 - 88 .YANG Junru,JING Benyu,LI Ruichuan,et al.Research on performance monitoring and control for harvesting and separating hydraulic system of combine harvester[J].Machine Tool and Hydraulics,2021,49(9): 83 - 88 . [10] 竹瑞珩,李耀明,唐忠,等.履带式联合收获机变速箱总成疲劳试验台的研制[J].机械传动,2022,46(10): 135 - 141 .ZHU Ruiheng,LI Yaoming,TANG Zhong,et al.Development of fatigue test bench for gearbox assembly of crawler combine harvester[J].Journal of Mechanical Transmission,2022,46(10): 135 - 141 . [11] 周陈林,汪小旵,何瑞银,等.收割机作业路线和地块条件匹配模型与分析[J].江西农业大学学报,2022,44(4): 1023 - 1033 .ZHOU Chenlin,WANG Xiaochan,HE Ruiyin,et al.Matching model and analysis of harvester operation routes and plot conditions[J].[J].Acta Agriculturae Universitatis Jiangxiensis,2022,44(4): 1023 - 1033 . [12] 罗承铭,熊陈文,黄小毛,等.四边形田块下油菜联合收获机全覆盖作业路径规划算法[J].农业工程学报,2021,37(9): 140 - 148 .LUO Chengming,XIONG Chenwen,HUANG Xiaomao,et al.Coverage operation path planning algorithms for the rape combine harvester in quadrilateral fields[J].Transactions of the Chinese Society of Agricultural Engineering,2021,37(9): 140 - 148 . -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 18
- HTML全文浏览量: 7
- PDF下载量: 4
- 被引次数: 0
 京公网安备 11010502037498号
京公网安备 11010502037498号
